
自动化物料搬运系统设计
一、引言
随着制造业的快速发展,物料搬运系统的自动化已成为提高生产效率和降低成本的关键。本文旨在设计和实现一种自动化物料搬运系统,通过软硬件的集成,实现对物料的高效、准确和可靠的搬运。
二、系统需求分析
在系统需求分析中,我们首先对物料搬运流程进行详细的研究,明确了系统的基本功能需求,包括物料的识别、定位、抓取、运输和放置等。我们还对系统的性能需求进行了分析,包括搬运速度、精度、可靠性和安全性等。
三、系统硬件设计
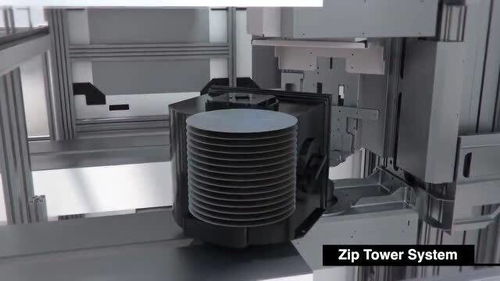
在系统硬件设计中,我们采用了一种基于工业机器人的物料搬运方案。具体包括:机器人控制器、伺服电机、编码器、搬运装置和安全保护装置等。其中,机器人控制器负责控制机器人的运动轨迹和姿态,伺服电机为机器人提供动力,编码器用于反馈电机的旋转角度和速度,搬运装置用于抓取和放置物料,安全保护装置则用于防止意外碰撞和故障。
四、系统软件设计
在系统软件设计中,我们采用了一种基于PLC的控制策略。具体包括:PLC控制器、传感器和通信接口等。其中,PLC控制器负责处理所有输入信号并控制相应的输出信号,传感器用于检测物料的定位和姿态,通信接口则用于实现与上位机的数据交换和控制指令传递。
五、系统调试与优化
在系统调试与优化阶段,我们首先对硬件系统进行了调试,确保各部件工作正常并满足性能要求。随后对软件系统进行了测试和优化,实现了对物料搬运流程的精确控制和对意外情况的可靠处理。我们还对整个系统进行了综合测试,验证了系统的整体性能和稳定性。
六、结论与展望
本文设计和实现的自动化物料搬运系统,基于工业机器人和PLC控制策略,实现了对物料的高效、准确和可靠的搬运。通过软硬件的集成,我们成功地提高了生产效率并降低了成本。该系统的性能和稳定性均得到了充分的验证,可广泛应用于各类制造业中的物料搬运环节。
展望未来,我们将继续对自动化物料搬运系统进行优化和完善。一方面,我们将进一步研究和学习新的控制算法和技术,以提高系统的搬运速度和精度。另一方面,我们也将注重系统的智能化发展,通过引入更多的传感器和智能算法,实现对物料的自动识别、分类和排序等更多功能。我们还将努力实现系统的远程监控和管理,以适应更多复杂和多变的生产环境。